【牛科技】NGP上车,小鹏能把特斯拉(NOA)打得找不到东?
随着小鹏NGP (Navigation Guided Pilot)(公测版)大规模上车,汽车智能化横向对比时代正式开启!
2021年1月25日,那位曾放出豪言:“中国市场上打到特斯拉找不到北,国际市场上迟早会相见的小鹏汽车,”终于交卷了。在当天,选购了X pilot 3.0 且购买 NGP软件(2万元)的消费者,将会通过OTA的方式收到期待已久的礼物——NGP。
从实现功能来看,NGP自动导航辅助驾驶指的是可以基于用户设定的导航路线,实现从A点到B点的自动导航辅助驾驶。

该功能目前可实现辅助用户实现自动变道超越慢车、自动选择最优车道、自动限速调节、自动进出匝道、自动切换高速公路等功能,看起来更像是小半个高速自动驾驶(不是完全自动驾驶的主要原因可能是 事故责任承担方依旧是消费者)。
因此可见,小鹏NGP与特斯拉NOA就是直接的接竞争关系。
特斯拉NOA大家都清楚,2019年推出时官网自称为自动驾驶,以其高超的可靠性(高速自动领航驾驶接管率极低)名扬海外。
但当时官网标榜以“自动驾驶”的夸大宣传导致了消费者过高的信任该系统,忽略了其客观局限性,导致后来出现了不少事故。最后迫于舆论压力,特斯拉不得不把官网上的“自动驾驶”改为“辅助驾驶”,但这不影响,该系统已经成为了汽车向智能化变革的旗帜。
一个是后起之秀,一个是行业教父,谁更强呢?
激进的特斯拉
在感知硬件层面,特斯拉一直是视觉方案的追随者,辅助感知是一颗毫米波雷达。
拿目前搭载了特斯拉 Auto Pilot 3.0硬件方案的 Model 3来看,其采用了8 颗摄像头+1颗77Ghz毫米波雷达的感知方案(160米的有效距离)、12颗超声波雷达的融合感知方案。
其中8个摄像头分别为前三目总成、车身4颗环视ADAS摄像头和1颗实现倒车影像的摄像头。

其中前三个摄像头,兼顾车辆前方的宽视角以及远距离物体的探测,但不同焦距摄像头的物体识别方式与单目类似,基于深度学习模型,特斯拉叫它Tesla Vision。
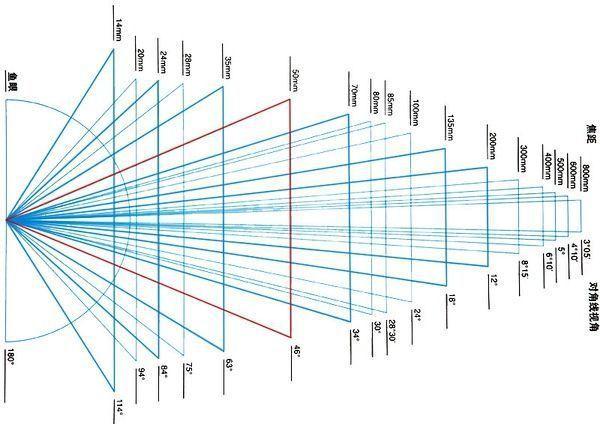
其中主视野摄像头:范围可达150米,视野能覆盖大部分交通场景。
鱼眼镜头:视野120度,范围60米,能拍摄到交通信号灯、行驶路线上的障碍物和距离较近的物体,适用于城市街道、低速缓行的交通场景。
长焦距镜头:视野相对较窄,适用于高速行驶的交通场景,可以识别最远250米的物体。同时做行车记录仪使用。识别原理类似于单目,和双目RGB-D的原理不同。
总体可见,前向三颗视觉摄像头基本解决了车道识别、跟车距离、障碍物识别、道路限速等所有场景的感知。
车身两侧的单颗摄像头和尾部摄像头主要功能是实现变道感知、车辆车道定位、复杂路况场景探测。

毫米波雷达是辅助视距摄像头感知,测试障碍物距离。
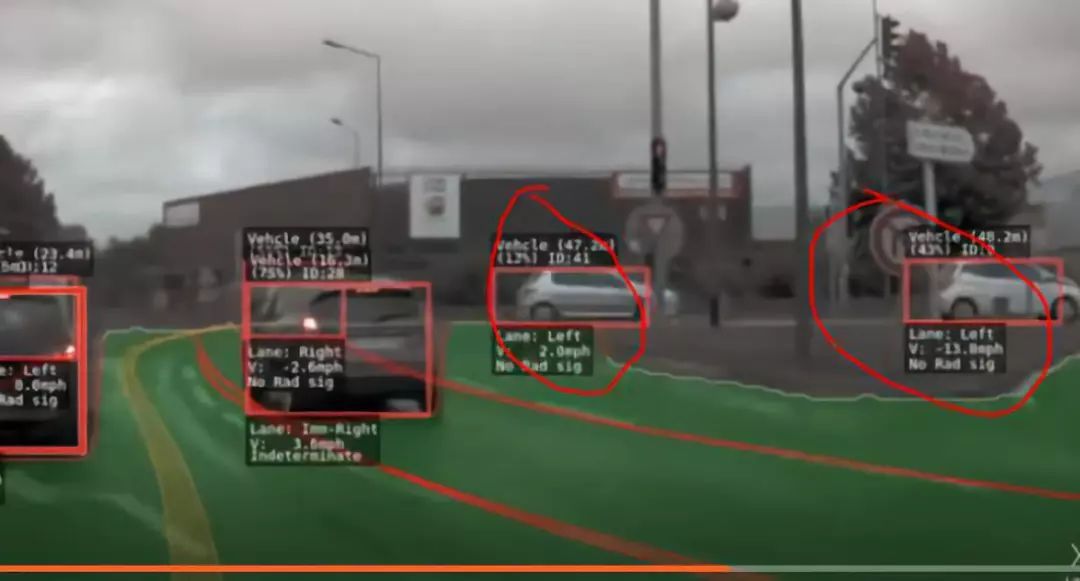
融合所有传感器,Auto Pilot 3.0硬件感知方案就能实现一个类似于下图,严丝合缝、360°无死角监控的感知方案,实现NOA功能。

但总体来看,这种方案比较冒险,因为视觉摄像头和人眼感知相似,在强光、路面倒影等明暗变化大,等特殊场景下两眼一抹黑基本就失效了。
辅助的感知方案也只有1颗前向毫米波雷达,势单力薄。可以说用这点装备实现NOA证明了特斯拉深度学习视觉的实力强悍,也能说明其在特殊场景下的安全冗余几乎没有。
特斯拉的方案主要依靠视觉,所以 Tesla 的环境感知三维重建是基于二维的。二维转换为三维,必然有信息丢失。从之前发布的视频可以看出, Tesla 对远处的物体有误识别的情况。特别是这种情况:一个行人,在晚上,穿着黑衣服,突然从路边窜出来。毫米波看人本来就不行,超声波又太近,视觉是两眼一抹黑。别说各种视觉欺骗了。
更注重冗余的小鹏汽车
在感知硬件方面,小鹏汽车和特斯拉同样是视觉方案的追随者,但小鹏汽车明显为中国路况做了全新的结构设计和安全冗余。
在感知方面,X Pilot 3.0配备了13个摄像头(前三目、4颗ADAS摄像头、4颗泊车360环视摄像头、1颗车内人脸识别摄像头、1颗行车记录仪摄像头)、5颗毫米波雷达、12颗超声波雷达,以及特斯拉不具备的双频高精度GPS,高精度地图定位以及V2X技术。
在感知视觉方面,小鹏 X Pilot 3.0和与特斯拉 Auto pilot 3.0有很多相似之处。
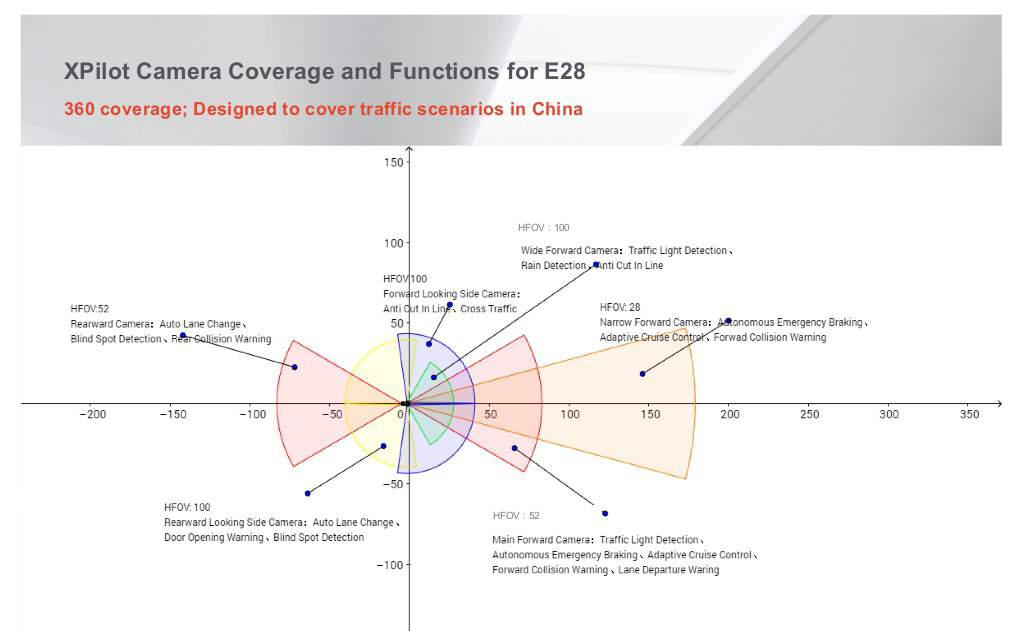
首先是正前方的三目摄像头(安装在前挡风玻璃上的三颗摄像头)均为2M像素,帧率15/60fps,按HFOV(Horizon Field of View)分为:
远距感知 HFOV 28:窄视角的前向摄像头,1828*948的分辨率,15fps,150m以上的路面情况,用于AEB(自动紧急刹车)、ACC(自适应巡航)和前向碰撞预警。
中距感知 HFOV 52:主前向摄像头,有效距离30-70米之间,用于交通信号灯检测(会看红绿灯)、AEB、ACC、前向碰撞预警和车道感知;
近距感知 HFOV 100:宽视角的前向摄像头,40米范围以内,用于交通信号灯检测(会看红绿灯、应该是辅助主前向摄像头的)、雨量检测(自动雨刮要靠它)和防加塞(看的角度更广)。
除了前向三目之外,P7左右车身分别安装有1颗侧视摄像头,尾部安装有一颗后视摄像头。
侧视摄像头,都是HFOV 100,1M像素, 30fps,分辨率457*237,用于防加塞和侧向车辆的检测。
后视侧边摄像头,用于ALC(自动变道)、开门预警和盲区检测;后向的摄像头,就一个HFOV 52,应该与前向的主摄像头一致,2M像素,帧率30fps,用于ALC、盲区检测和追尾预警。
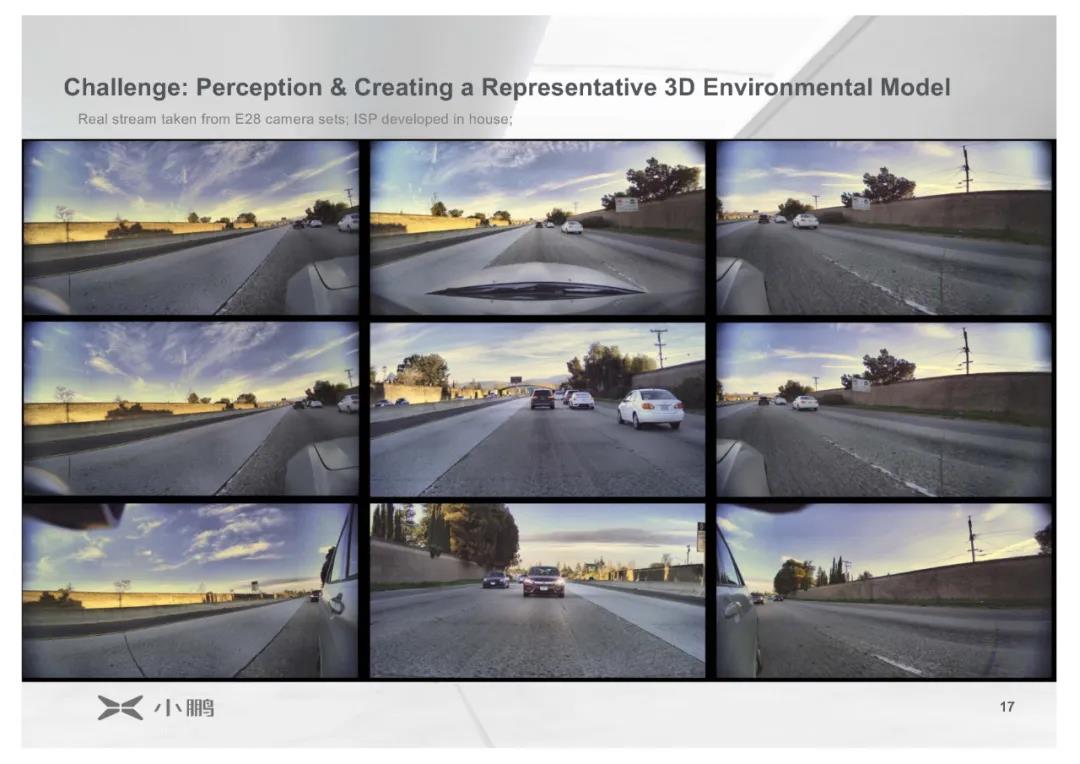
通过前向这些摄像头的融合感知,X pilot 3.0小鹏与Auto pilot 3.0一样,都能做到360°全场景覆盖,而且它们视场角还有一点点的重叠,安全性更高。
虽然数量上很相似,但X pilot 3.0硬件方案定型更晚,所以在规格上明显更高。
拿数据说话,目前pilot 3.0前视主摄像头为200万像素,特斯拉仍在采用130万像素;前者具备更强的低光性能,即在低光照情况下性能更佳。当然除了摄像头之外,接下来要说的毫米波雷达感知性能比特斯拉的雷达技术要先进一代,具体在感知能力上大约为三倍。
除了硬件规格不同之外,在硬件布局方面,小鹏和特斯拉也有很大不同。
牛车网查阅到前特斯拉,现小鹏汽车员工的一段介绍:“我在特斯拉工作期间,深知特斯拉系统架构的在中国场景下的局限性,因此小鹏P7架构在设计的过程中充分考虑了中国场景的特殊性,本土化能力更强。”

所以大家能够看到,同样是主视觉方案,但小鹏的侧视摄像头在后视镜下方,而特斯拉在B柱上方。

小鹏的感知方案不仅如此,可能是害怕纯视觉出现两眼一抹黑的尴尬。在冗余感知方面,X pilot 3.0还配置了5颗第五代毫米波雷达,分别在车头和车身四个角上(盲区检测、变道等感知)。
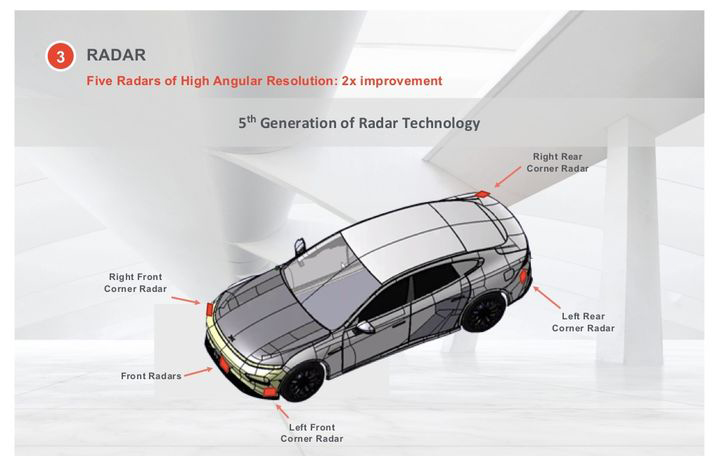
5可毫米波雷达融合之后相当于又形成了一套环视感知,除此之外,其相对第四代雷达(特斯拉)提高了两倍角分辨率,同时安装更加方便。
第五代雷达可以镶嵌到汽车包围里面,不像第四代要挖个洞,暴露在外面(蔚来EC6的毫米波雷达外置且暴露在在前格栅下方),更加安全美观。
除此之外,小鹏P7还冗余融合了双频GPS和高精度地图导航技术。

尤其是高精度地图,可以让车辆实现超视距感知,拜托传感器可是距离的限制,除此之外,基于高精度地图的双频GPS定位也能让小鹏汽车行驶在更早的判断弯道曲率等。
技术差异还有很多,鉴于细致枯燥技术路线分析十分无味,打此结束。
总之可以证明一个结论,从感知方案来看,X pilot 3.0绝对可以吊打Auto pilot 3.0。而搭载X pilot 3.0 版本的小鹏P7在硬件设计上也绝对领先于搭载特斯拉Auto pilot 3.0的Model 3。之前放出豪言的何小鹏也绝对不是干逞强。
最后适当提醒一下,硬件好不代表功能体验极致,中间还有芯片算力、软件、交互方式是否友好等。消费者体验一个功能往往是比较感性的,NGP给消费者的体验能够胜过NOA,期待下篇试驾体验报道。






显示更多评论