
通过此次合作,双方将在中国开发和发布Mobileye的路网采集管理(REM®)产品,结合四维图新自动驾驶地图(HAD Map)与高精度定位能力,联手推进中国自动驾驶一体化解决方案的落地与发展。2018CES期间,英特尔子公司Mobileye和四维图新宣布达成全面战略合作伙伴关系,...
1
1
0
由牛车网、汽车智能、汽车观察杂志主办,硬蛋空间、腾讯汽车、汽车族杂志社、斗鱼、秒拍、机器人大讲堂、南极圈协办的第五期汽车智能沙龙——“你好,智能驾驶”于10.29在北京中关村硬蛋空间成功举办。现场气氛热烈,极目智能技术有限公司CEO程建伟先生发表了主题演讲,以下是汽车智能为您整理的演讲实录:

程建伟:谢谢大家我是从武汉过来的,我今天给大家分享的是如何打造用户黏性的ADAS系统,接下来沿着我的内容讲一下,第一个部分是ADAS的四大矛盾,第二部分是极目ADAS。
一、ADAS领域的矛盾
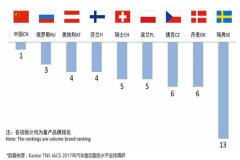
现在ADAS特别的火,在国内新车市场装载率3%,如果说按照存量来说的话不到1%的人装ADAS,从现在的情况我们可以了解到,很多人讲ADAS,但是有多少人用ADAS?我知道很多从事汽车行业的媒体包括汽车行业的从业者,甚至在深圳的一些有自己的产品上面搭载的ADAS的人,都没有体验过比如说沃尔沃带ADAS是什么样的,这个是非常现实的情况。
目前后端的大产业像行车记录仪,导航啊,包括我们也知道小米、360的这个行车记录仪也都在带,但是并没有真正专业的产品来介绍这个市场是什么样的。在后续市场的宣传包括媒体的宣传下,安全是很多人的需求,那么安全是不是缺失了,实际上只有1%的渗透率,因为汽车市场是比较慢的,有高标准长周期。
ADAS的产品整个还是掌握在像博世这种外资零部件企业上,但是在中国这一块,几乎可以说,除了今天来参与的创业者之外,在这一块的技术,还是比较空白的,或者说刚刚起步的状态。
第二个矛盾是用户对ADAS的期望,和用户实际体验的矛盾,在体验的时候,实际上后端的产品,体验真的是谈不上对用户有价值,更多的是在干扰或者说在乱报,包括一些品牌大厂做的产品也脱离不了这样的情况。
第三个矛盾是产品安装一致性和后装车型多样性,不管是摄像头的校正还是接线都是非常的多样性的,快的4个小时,慢的6个小时,像有的是要发到以色列装了之后再发到中国,这个都是非常严峻的问题。
第四个矛盾就是价格,在中国做任何产品,不到一定价格以下是做不动的,我们目前ADAS的价格拐点还没有真正的完善,而用户消费级的ADAS还会成为潮流,一个产品要放量的时候不是这个社会是否需要,而是它是否到一个价格的范围。
二、极目ADAS介绍
所以我们做ADAS采取的方式是我们从后装进入的。

接下来我们会如何介绍为什么要从后装来做,3月份我们推出APP,极目启行,用手机APP,手机摄像头形成ADAS的功能,最核心的就是两个,一个是摄像头,一个是处理器,像在苹果6上,效果就做的特别好,准专业级别,可以做的比国外还好,就是这个检测量,这个其实不是牛,是摄像头处理器确实还可以。这个产品卖了2000多套也算是我们比较新的产品,这个产品其实有几个有点。低门槛,高准确,至少比我们当时市面上可以看到的这个ADAS的这个准确率都高,很多的用户测完之后直接跟我们签协议的,还有互联网搬运的模式,接下来会有比较大的公司拿这个产品做运营。
这个产品方案,也是有一个缺点,也可以给大家分享一下。首先不占用用户的手机,现在很多时候手机功能太多,又是微信又是导航,我一个ADAS管理的话连续性不够,第二个就是手机和图像处理以及录像的时候发热比较多的,很多用户会比较敏感。
接下来介绍我们硬件的产品,这个在今年8月份首发的,小批量已经做完,有三个标签一个是专业的ADAS,第二个搭载北斗高清定位,第三个有车载热点,也就是有3G联网的这个功能,具备车联网的通道。
从产品的开发和市场营销的角度我们更多的还是回顾到用户场景,现在虽说我们的技术是做的比较深,但是我们现在是跳出技术来讲我们的场景,就是说ADAS到底给用户带来什么样的价值,这是现在在这个起步阶段大家要思考的问题,我们认为,首先第一就是在城市的驾驶当中,比较典型的前面的车刹车追尾,很多时候不注意就会追上,我们遇到一次,前面急刹车我们也急刹车,我们没有追上前面的车但是我们被后面的车追上,这样的事故是非常典型的,第二个城市堵车的时候,堵车80秒的时候脚就会松,驾驶员也会有这个感觉,我自己也会有吓倒,其实这两个场景都是在保险里面非常多的这样的一个情况。第三个的话,红绿灯前面的车开了,我在后面还是玩手机,我忘了,这个时候来一个提醒,这几个功能我们目前都做的是比较完善的,放上去了。
第二个就是高速,大家相对来说比较好理解一些,高速上的这个车速保持,其实高速上,前方碰撞是事故率最高的事故,紧接着就是这个车道偏离,车道偏离的这个失控率没有前方高,前方追尾的十分之一吧,死亡率是前方追尾的几十倍,因为一般的车偏道冲出去一般就是伤或者是亡非常的严重,所以我们在高速上也会推刹车追尾这个功能,总结下来,大概就是有四个特点,第一个是专业化,我们是按ISO的标准来进行整个报警机制,包括偏离还有前方碰撞,几乎是一致的,我们从底层算法还有软件都自己开发的,我们在单目这一块,目前从经销商包括合作伙伴的反馈下来我们目前是最好的。第三我们有联网化,同时我们也做了一些建议安装的工作,包括我们在全球首套的传感器,来获取的信号,也都是降低用户门槛的一些技术工作。
前面的功能是围绕狭义的ADAS,在这个方面我们可以稍微给大家澄清和普及一下,目前所有的后装都会说我有前方碰撞预警,但是只是一个监测预测,这个是不同的,后面我会介绍的更加详细给大家展开来讲。车距检测预警也就是前方的车除以速度也就是相对的时间,但是它并不具备危险性,而前车碰撞是一个相对的速度,从80到60,这是一个相对速度的概念,目前国内绝大部分的产品都没有分这个,没有分更多的还是因为技术的元素。还有前车提供的这个提醒,更多的是针对城市路况给用户提供的功能。
我们北斗端的定位驾驶报道还有车载热点,还可以举报罚款的这些功能也都可以,我们把行车记录作为我们最后一个标签,我们是带一个行车记录仪的专业的ADAS的设备。
我们在宣传方面更多的是希望把用户带入场景里,我们这个地方有一点点参考就是OPPO,充电5分钟,通话5小时,我们就变成前面急刹车,后车少追尾,追尾小背锅。
再一个是车道偏离预警,疲劳可能也会带来偏离,那么第二个就是驾驶的规范性,2005年有一个司机,当时因为车道偏离不打灯带来的,在韩国的话,车道偏离不打灯是罚款比较重的,所以国内这一块也会慢慢的上起来,还有堵车的提醒。
前车启动提醒,还是在玩手机,前面的车走了,后面的车就会逼你,从整个城市角度来讲,它其实单个的,是整个城市的交通上面,某个绿灯30秒,某个人单独3、5秒的话,要10秒才能通行,那么我们整个效率也会有影响。
产品虽然定位于民用的,但是我们也搭载很多的功能,比如说北斗高清定位,我们的这款产品是它的收款,在后装市场上的这个产品。这个技术最新的一个搭载产品是阿里他们的互联网汽车。
然后我们第一可以获得高清度的这个车速,还可以给用户一个更好的导航的信息,因为GPS飘离10米以上。第三个是在隧道或者说半道可以会提供相应更好的位置。还有自驾游的时候,可能车上其他人流量不够也可以采取这个来上网。

我们讲70度,是在行车记录仪的这个网角和ADAS取一个平衡,我们知道40度的角度做行车记录仪是不够,目前的这个广角是70度产品,但是做ADAS是不行,因此我们取的中间是70度也是刚好两个中间的这个角度,可以保证我们上传准确率。
温度的话,在武汉今年是比较热,目前还没有出现死机的现象,大家也知道今年1月份的时候,腾讯出的一款比较新的产品,但是最大的这个致命就是重复的死机,所以对后装的产品,产品的稳定性是非常重要的。
然后我们是一个黑盒子的形状,为什么是黑盒子,因为现在的行车记录仪,灯光的闪烁还有驾驶的安全,本身是不利于这个安全的,这个也是现在比较多的,像行车记录仪也是比较受大家的这个欢迎的。
现在我讲一下专业化水平,跟车道偏离,从驾驶规范性的角度,我们认为要达到95%以上才可以做前车预警,也是我们为什么看到的产品是在左边,右边的功能大家都不讲或者说避而不见,因为只要把前面做到95%,才有资格做这个前车预警基于PDC,以及提醒,这个必须对整个的这个图像的准确性还有连续性,以及边框的获取都要非常的精准,才能把后面这一块做好,有什么好处,就是说前面是一个规范性,你其实变道也无所谓,只是一个驾驶规范性的问题。
但是后面的这个情况,飚车有碰撞的话,那么就是驾驶安全性的,那么你不采取措施就会发生碰撞。所以我们的产品做用户真正有用的ADAS,真正可以提供安全的性能,提升驾驶的规范性和安全性。
三、国内复杂场景的应对
接下来这也是我们国内的ADAS大家会讲的比较多的,就是这种乱七八糟的场景,比如说下雨,我们在今年夏天,武汉暴雨的时候,也就是整个武汉城市,被淹的那一次,我们的这个检测率不是全部的好,它也会出错,我们的出错会少,这是我们感觉比较自豪的一个地方。
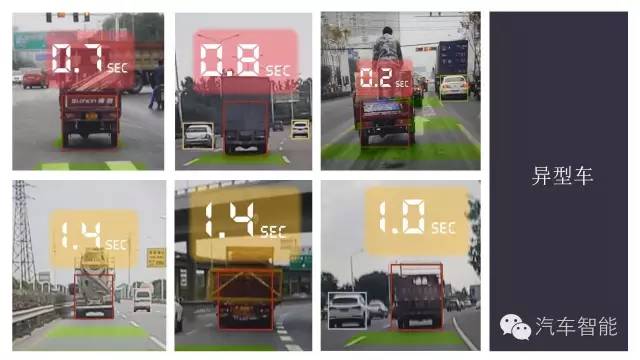
然后就是国内的异型车,其实所有人担心国内异型车怎么办,双目是最好的解决办法,而单目只能更多提供样本,我们也是不断的采集我们的样本,这里没有Mobileye的人,其实Mobileye的准确率,没有他们说99.99%,完全没有那么高,其实在很多的场景下,它是不行的,第一就是中国异型车,第二个就是在晚上行人检测是关的,第三个是通过这个行车车灯来检测的,或者说两个灯熄掉一个灯,或者说像这个罐车乱七八糟的,所以说把这些因素加在一起之后,这个准确率也就97%到98%,没有那么好,Mobileye做的确实好,但是没有宣称的那么好。
我们出去的每一个镜头是经过严格的校正的,这是做ADAS非常关注的,不管是车距的检测还是车型的检测,镜头的光学参数,准确性是非常重要的,包括广角镜头不知道大家看到那个视频没有,中间包括旁边的图像都已经全部畸形了,所以他们讲做ADAS都成笑话了。
还有我们测距模型稳定性,我们的检测距离在70到80,然后我们跟踪距离可以做到80到100米,这个主要的原因还是我们镜头稍微广了一点,如果镜头变窄或者像素变高的话这个也都是可以超越的。
右边的这个手机上的这个屏是给大家看的,正常是时候是不用的,然后不带屏的手机以及下面的这个小的LED的屏,前面的车是在减速,我脚松了一点点,这个也可以提醒。前方的车启动了,这是晚上的一个状态的。这是前端的车切入进来,测的也是挺准的。
这是我们公司简单的介绍我们专注于ADAS的这个专注看法,我是2011年知道有ADAS这样的公司,知道这个行业很牛逼,然后就投入这个行业来,差不多过去4年的时间,几乎没有人知道,现在的这个产品也是在今年陆陆续续的发布出来。
我们的产品目前是更多面向后装市场,包括10月份,众安保险的合作,还有我们也会跟物流还有车辆合作更多一点,从创业公司来说我们是没想太开,但是我们发布这个产品之后,目前我们是有车厂跟我们建立合作的,所以这一块,也是自我激励一下,国内ADAS的机会还是挺大的,像我们知道的博世、德尔福他们其实在ADAS的合作上,是非常高的,开发费、合作费都是非常高的,包括刚才姜总提到本土的厂商是非常受主机厂的欢迎和支持的,所以也鼓励大家继续加油,谢谢大家。
嘉宾简介:
程建伟 极目智能技术有限公司CEO
华中科技大学光学博士,2011年致力于ADAS的研究与开发,武汉市第8批355光谷人才计划高端人才,2015首届中国光学工程学会科技创新奖第一名。
文章来源:“汽车智能”微信公众号

通过此次合作,双方将在中国开发和发布Mobileye的路网采集管理(REM®)产品,结合四维图新自动驾驶地图(HAD Map)与高精度定位能力,联手推进中国自动驾驶一体化解决方案的落地与发展。2018CES期间,英特尔子公司Mobileye和四维图新宣布达成全面战略合作伙伴关系,...

2018年1月6日,中国创新创业大赛第二届国际新能源及智能汽车大赛全球挑战赛在北京理工大学隆重举办。26个来自国内6大赛区、国际4大赛区的新能源及智能汽车创新创业项目上演了一场巅峰对决。最终,自动驾驶激光雷达环境感知解决方案项目获得本次大赛一等奖,无人驾驶专车-颠覆未来出行、自动...

亲爱的合作伙伴们:在您的支持与帮助下,上海决策者经济顾问股份有限公司(CDMC)Autopros Division正式步入第10个年头。在此,请允许我们对所有的新老客户致以最诚挚的谢意! 为汽车行业提供高效交流,集思广益的最佳互动平台,帮助您在快节奏的商业环境下规划并实施...
导读:新华信首次提出 “整车厂能否迈入售后业务的‘后授权’时代,才是整个维修大市场能否起飞的关键”。 12月20日,由汽车与驾驶维修传媒主办的以“洞察产业变革,创想服务未来”为主题的2017中国汽车服务产业高峰论坛在北京香格里拉饭店成功举办。 峰会现场,特恩斯新华信CEO金永生...